You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
Copy file name to clipboardExpand all lines: README.md
+24-11Lines changed: 24 additions & 11 deletions
Display the source diff
Display the rich diff
Original file line number
Diff line number
Diff line change
@@ -9,7 +9,7 @@
9
9
[TTY Commands](#ttycommands) |
10
10
[Load/Save/Record Commands](#recorder) |
11
11
[NTRIP Client](#ntripconfig) |
12
-
[Socket Server / NTRIP Caster](#socketserver) |
12
+
[NTRIP Caster/Socket Server](#socketserver) |
13
13
[GPX Track Viewer](#gpxviewer) |
14
14
[Mapquest API Key](#mapquestapi) |
15
15
[User-defined Presets](#userdefined) |
@@ -108,7 +108,7 @@ For more comprehensive installation instructions, please refer to [INSTALLATION.
108
108
3. To connect to a GNSS receiver via USB or UART port, select the device from the listbox, set the appropriate serial connection parameters and click
109
109
. The application will endeavour to pre-select a recognised GNSS/GPS device but this is platform and device dependent. Press the  button to refresh the list of connected devices at any point.
110
110
- `Rate bps` (baud rate) is typically the only setting that might need adjusting, but tweaking the `timeout` setting may improve performance on certain platforms.
111
-
- When the connection is first established, PyGPSClient will send various query messages (*one for each selected protocol*) to the receiver in an attempt to establish its model and firmware version. You may see a handful of 'unknown protocol' warnings in response to some of these queries - these can be disregarded.
111
+
- When the connection is first established, PyGPSClient will poll various hardware information messages (*one for each selected protocol*) to the receiver in an attempt to establish its model and firmware version. You may see a handful of 'unknown protocol' warnings in response to some of these queries - these can be disregarded. **NB:** Some receivers will not output hardware information messages at low baud rates (<38,400).
112
112
- If you get a permissions error on attempting to connect to a serial port e.g. `[Errno 13] permission denied /dev/ttyACM0`, refer to the [Installation Guidelines - User Privileges](https://github.com/semuconsulting/PyGPSClient/blob/master/INSTALLATION.md#user-privileges).
113
113
- The `Msg Mode` parameter defaults to `GET` i.e., periodic or poll response messages *from* a receiver. If you wish to parse streams of command or poll messages being sent *to* a receiver, set the `Msg Mode` to `SET` or `POLL`. An optional serial or socket stream inactivity timeout can also be set (in seconds; 0 = no timeout).
114
114
4. A custom user-defined serial port can also be passed via the json configuration file setting `"userport_s":`, via environment variable `PYGPSCLIENT_USERPORT` or as a command line argument `--userport`. A special userport value of "ubxsimulator" invokes the experimental [`pyubxutils.UBXSimulator`](https://github.com/semuconsulting/pyubxutils/blob/main/src/pyubxutils/ubxsimulator.py) utility to emulate a GNSS NMEA/UBX serial stream.
@@ -212,7 +212,7 @@ For more comprehensive installation instructions, please refer to [INSTALLATION.
212
212
213
213
The UBX Configuration Dialog currently provides the following UBX configuration panels:
214
214
215
-
1. Version panel shows current device hardware/firmware versions (*via MON-VER and MON-HW polls*).
215
+
1. Version panel shows current device hardware/firmware versions (*Double-left-click to refresh*).
216
216
1. Protocol Configuration panel (CFG-PRT) sets baud rate and inbound/outbound protocols across all available ports (*legacy protocols only*).
217
217
1. Solution Rate panel (CFG-RATE) sets navigation solution interval in ms (e.g. 1000 = 1/second) and measurement ratio (ratio between the number of measurements and the number of navigation solutions, e.g. 5 = five measurements per navigation solution) (*legacy protocols only*).
218
218
1. For each of the panels above, clicking anywhere in the panel background will refresh the displayed information with the current configuration.
The NMEA Configuration Dialog currently provides the following NMEA configuration panels:
243
-
1. Version panel shows current device hardware/firmware versions (*via PQTMVERNO polls*).
243
+
1. Version panel shows current device hardware/firmware versions (*Double-left-click to refresh*).
244
244
1. Dynamic configuration panel providing structured updates for supported receivers e.g. Quectel LGSERIES via PQTM* sentences, or LCSERIES via PAIR* sentences. Once a command is selected, the configuration is polled and the current values displayed. The user can then amend these values as required and send the updated configuration. Some polls require input arguments (e.g. portid or msgname) - these are highlighted and will be set at default values initially (e.g. portid = 1), but can be amended by the user and re-polled using the  button.
245
245
1. Preset Commands widget supports a variety of user-defined NMEA commands and queries - see [user defined presets](#userdefined).
Version panel shows current device hardware/firmware versions (*Double-left-click to refresh*).
261
+
260
262
The TTY Commands dialog provides a facility to send user-defined ASCII TTY configuration commands (e.g. `AT+` style commands) to the connected serial device. Commands can be entered manually or selected from a list of user-defined presets. The dialog can be accessed via the TTY Config button or Menu..Options..TTY Commands.
261
263
- CRLF checkbox - if ticked, a CRLF (`b"\x0d\x0a"`) terminator will be added to the command string.
262
264
- Echo checkbox - if ticked, outgoing TTY commands will be echoed on the console with the marker `"TTY<<"`.
@@ -356,28 +358,39 @@ By default, the server/caster binds to the host address '0.0.0.0' (IPv4) or '::'
356
358
357
359
1. Select NTRIP CASTER mode and (if necessary) enter the host IP address and port.
358
360
1. Select 'TLS' to enable an encrypted TLS (HTTPS) connection.
359
-
1. An additional expandable panel is made available to allow the user to configure a connected RTK-compatible receiver to operate in either `FIXED` or `SURVEY-IN` Base Station mode (*NB: parameters can only be amended while the caster is stopped*).
361
+
1. An additional expandable panel is made available to allow the user to configure a connected RTK-compatible receiver to operate in either `BASE FIXED`, `BASE SVIN` (Survey In) or `ROVER` mode (*NB: parameters can only be amended while the caster is stopped*).
360
362
1. Select the receiver type and click the Send button to send the appropriate configuration commands to the receiver.
361
-
1.**NB** Septentrio Mosaic X5 or Unicore UM980: These receivers are configured via ASCII TTY commands - to monitor the command responses, set the console protocol to "TTY" (*remember to set it back to RTCM when monitoring the RTCM3 output*). Note also that the input (ASCII command) UART port may be different to the output (RTCM3) UART port - make sure to select the appropriate port(s) when configuring the device and monitoring the RTCM3 output.
362
-
1. NMEA messages can be suppressed by checking 'Disable NMEA'.
363
+
1.**Where supported by the receiver**, NMEA messages can be suppressed by checking 'Disable NMEA'.
363
364
1. NTRIP client login credentials are set via the user and password fields.
364
365
1. Check the Socket Server/NTRIP Caster checkbox to activate the caster.
365
366
1. To stop the caster, uncheck the checkbox.
366
367
367
368
### <aname="basestation">Base Station Configuration</a>
368
369
369
-
**NB:** Some receivers (*e.g. Quectel LG Series*) will require one or more restarts to enable or disable Base Station mode.
370
+
The current version of PyGPSClient supports 'one click' base station configuration for the following receiver types:
371
+
1. u-blox - any modern u-blox RTK model (e.g. XED-F9P, ZED-X20P) configured by binary UBX CFG-VALSET commands.
372
+
1. Septentrio - most Septentrio Mosaic series (e.g. Mosaic X5) configured by ASCII TTY commands.
373
+
1. Unicore - most UM9* series (e.g. UM981S) configured by ASCII TTY commands.
374
+
1. Quectel LG Series - most LG series (e.g. LG290, LG580) configured by NMEA PQTM commands.
375
+
1. Quectel LC Series - most LC series (e.g. LC29H) configured by NMEA PAIR commands.
376
+
377
+
**NOTE:**
378
+
1. Some receivers (*e.g. Quectel LG Series*) will require one or more restarts to enable or disable Base Station mode. This may take several seconds.
379
+
1. Different receiver models support different RTCM3 message cohorts, as indicated by the pygnssutils sourcetable entry e.g. `1006(5),1013(5),1019(5),1020(5),1033(5),1077(1),1087(1),1097(1),1127(1),1230(1)`
380
+
1. To monitor ASCII TTY command responses, set the console protocol to "TTY" (*remember to set it back to RTCM when monitoring the RTCM3 output*). Note also that the input (ASCII command) UART port may be different to the output (RTCM3) UART port - make sure to select the appropriate port(s) when configuring the device and monitoring the RTCM3 output.
|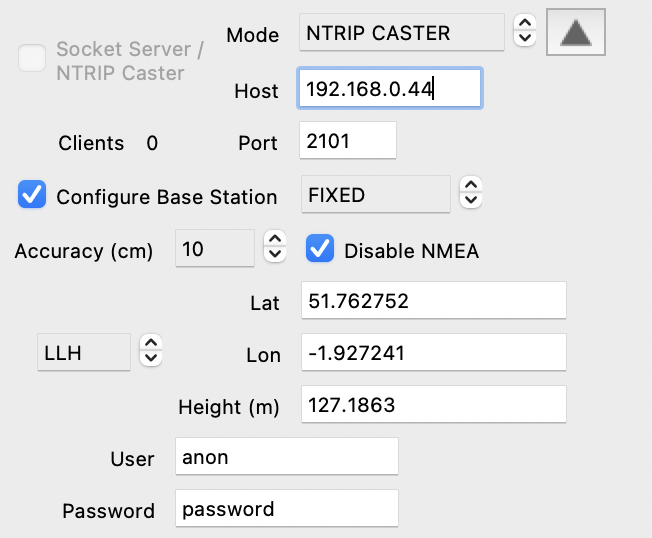|**FIXED**. In this mode, the known base station coordinates (*Antenna Reference Point or ARP*) are specified in either LLH or ECEF (X,Y,Z) format. The coordinates are pre-populated with the receiver's current navigation solution (if available), but these can (and normally should) be overridden with accurately surveyed values. If the coordinates are accepted, the Fix status will change to `TIME ONLY` and the receiver will start outputting RTCM `1005` or `1006` (*Antenna Reference Point or ARP*) messages containing the base station location in ECEF (X,Y,Z) format. |
374
-
|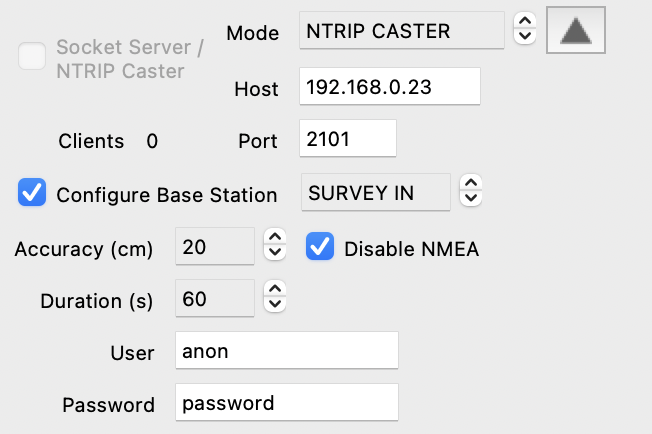|**SURVEY-IN (SVIN)**. In this mode, the base station coordinates are derived from a series of observations made by the receiver over a specified survey duration. The minimum duration is 60 seconds, but a longer survey may yield more accurate results. **Where supported by the receiver** in the form of SVIN status messages, survey progress can be monitored via a progress bar. If the survey is successful (*i.e. the requisite level of accuracy is achieved within the specified survey duration*), the Fix status will change to `TIME ONLY` and the receiver will start outputting RTCM `1005` or `1006` messages containing the base station location in ECEF (X,Y,Z) format. The surveyed base station location will be updated from the position provided by these RTCM `1005` or `1006` messages.|
375
-
|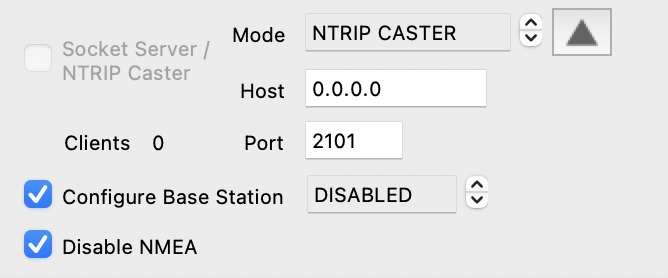|**DISABLED**. Disable base station and resume standard (Rover) operation. |
384
+
||**BASE FIXED**. In this mode, the known base station coordinates (*Antenna Reference Point or ARP*) are specified in either LLH or ECEF (X,Y,Z) format. The coordinates are pre-populated with the receiver's current navigation solution (if available), but these can (and normally should) be overridden with accurately surveyed values. If the coordinates are accepted, the receiver will start outputting RTCM `1005` or `1006` (*Antenna Reference Point or ARP*) messages containing the base station location in ECEF (X,Y,Z) format. |
385
+
||**BASE SVIN (Survey In)**. In this mode, the base station coordinates are derived from a series of observations made by the receiver over a specified survey duration. The minimum duration is 60 seconds, but a longer survey may yield more accurate results. **Where supported by the receiver¹** in the form of SVIN status messages, survey progress can be monitored via a progress bar. If the survey is successful (*i.e. the requisite level of accuracy is achieved within the specified survey duration*), the receiver will start outputting RTCM `1005` or `1006` messages containing the base station location in ECEF (X,Y,Z) format. The surveyed base station location will be updated from the position provided by these RTCM `1005` or `1006` messages.|
386
+
||**ROVER**. Disable base station and resume standard Rover operation. |
376
387
377
388
**NB:** To operate effectively as an RTK Base Station, antenna positioning is of paramount importance. Refer to the following links for advice:
Copy file name to clipboardExpand all lines: RELEASE_NOTES.md
+4-3Lines changed: 4 additions & 3 deletions
Display the source diff
Display the rich diff
Original file line number
Diff line number
Diff line change
@@ -4,12 +4,13 @@
4
4
5
5
FIXES:
6
6
1. Fix `CFG-VALSET ACK-NAK` error when configuring ZED-X20P as base station.
7
-
1. Fix `AttributeError: ... has no attribute frm_socketserver` error in Server Config panel when configuring Septentrio devices for SVIN.
7
+
1. Fix `AttributeError: ... has no attribute frm_socketserver` error in Server Config panel when configuring certain devices for SVIN.
8
8
9
9
ENHANCEMENTS:
10
-
1. Improve base station receiver configuration dialog.
11
-
1. Add connected device descriptor to status bar (e.g. "u-blox ZED-F9P", "Unicore UM981S", "Septentrio mosaic-X5" or "Quectel LG290AG03"). Note that some (mainly older) devices may not return a meaningful descriptor, in which case "N/A" will be displayed.
10
+
1. Improve Base Station receiver configuration handling in the NTRIP Caster/Socket Server dialog.
11
+
1. Add connected device descriptor to status bar (e.g. "u-blox ZED-F9P", "Unicore UM981S", "Septentrio mosaic-X5" or "Quectel LG290AG03"). **FYI** This is based on a series of query messages (*one for each enabled protocol*) sent approximately 3 seconds after the connection is started (*you may see 'unknown protocol' warnings in response to some of these messages; these can be ignored)*. Failing this, a generic descriptor is displayed on receipt of a message protocol unique to a particular manufacturer (*e.g. "u-blox" on receipt of a UBX message, "Unicore" on receipt of a UNI message, etc.*). Note that some (mainly older) devices may not return a meaningful descriptor, in which case "N/A" will be displayed.
12
12
1. Minor updates to serial port configuration panel (additional timeout values).
0 commit comments